Плата модуля драйвера шагового двигателя ULN2003 5 В 12 постоянного тока 4 фазы линий
37,75 руб.


Новое поступление
Характеристики
*Текущая стоимость 8 543,06 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Feb-21-2026 | 10850.19 руб. | 11067.21 руб. | 10958.5 руб. |
| Jan-21-2026 | 8799.86 руб. | 8975.34 руб. | 8887 руб. |
| Dec-21-2025 | 10679.42 руб. | 10893.57 руб. | 10786 руб. |
| Nov-21-2025 | 10593.76 руб. | 10805.6 руб. | 10699 руб. |
| Oct-21-2025 | 8458.25 руб. | 8627.5 руб. | 8542.5 руб. |
| Sep-21-2025 | 10422.71 руб. | 10630.37 руб. | 10526 руб. |
| Aug-21-2025 | 10337.27 руб. | 10544.82 руб. | 10440.5 руб. |
| Jul-21-2025 | 10252.72 руб. | 10457.96 руб. | 10354.5 руб. |
Описание товара


Общее описание
PMC007C2-это тип миниатюрного интегрированного шагового двигателя с микрошаговым контроллером, который может быть непосредственно установлен в задней части шагового двигателя серии 28/35/42(NEMA11/14/17). Контроллер серии предоставляет различные модели, которые могут быть выбраны на основе управления шиной can и различных значений тока. Легко достичь промышленной сети управления до 120 узлов, которые могут достичь замкнутого контроля на основе кодировщика в соответствии с требованиями пользователя. PMC007 принимает промышленный стандартный протокол управления CANOPEN DS301, который не только значительно упрощает сложность системы управления верхним слоем, но и максимально сохраняет гибкость управления и подходит для всех видов высокой точности, широкий спектр использования в промышленности.
Особенности
Широкий диапазон напряжения 9-28 в
Выходной ток 0.2A ~ 2A. Регулируемый фазовый ток по командам
Автоматическое управление ускорением и замедлением кривой S
Поддержка неизвестного режима/режима скорости/PV режим/режим PP/режим PVT/Аналоговое регулирование скорости/Аналоговое позиционирование/синхронный режим позиционирования и другие режимы движения
3 внешних переключателя, входные порты для настраиваемой аварийной остановки
Поддержка микрошагового разрешения 0/2/4/8/16/32/64/128
Подходит для детей на возраст от 4/6/8 линии 2-фазный шаговый moto
Поддержка PVT кубический сплайн интерполяция
Оптимизация времени синхронного управления в крупномасштабном и многоосевом сценария применения
Управление волшебными огнями
Сжигание и выключение автоматического выполнения пользовательской программы
Поддержка графического программирования
Поддержка языкового программирования LUA script
Миниатюрный размер 28 мм x 28 мм x 15,6 мм
Точный алюминиевый корпус, благоприятный для защиты и рассеивания тепла
Автоматическая защита от перегрева, перегрузки по току, перенапряжения и перенапряжения
Расположение порта терминала

Контактный номер: | 1. | 2. | 3. | 4. |
Дизайн: | M10 | M11 | M20 | M21 |
1. | 2. | 3. | 4. | 5 | 6 | 7 | 8 |
VDC | GND | CANH | CANL | DVDD | Аин | ENC1 | ENC2 |
Описание | |
Хост | PC PLC MCU |
Поддерживающий двигатель | 2-фазный шаговый двигатель |
Среда развития | VC C # Labview VB Linux Python |
Напряжение питания | DC9-28V |
Выходной ток | DC0.4-2A |
Микрошаговый | 0/256 |
Температура. Диапазон | -20 ℃ до 80 ℃ |
Максимальная частота импульса | 200K |
Долговечность | Более 20000 часов |
Вход | |
Общий ввод/вывод | Описание |
Функция ввода/вывода: | Аварийный Стоп Вход, Управление тормозом, цифровой вход/выход, аналоговый вход, заводской сброс, выход 5 В |
Входные характеристики | Входные характеристики |
Аналоговое регулирование скорости Входное напряжение: 0-3,3 В | |
Аварийное стоп Входное напряжение: 0-24 В | |
Режим управления | |
Описание | |
Поддержка режима управления | Режим положения, режим скорости, режим PV, режим PP, режим PVT, аналоговое регулирование скорости, аналоговое позиционирование, синхронное позиционирование |
Переключение режимов | Указанное переключение инструкции |
Коммуникация | |
Описание | |
Протокол | CANopen DS301/DS402 |
Скорость передачи данных: | 5 k - 1 Мбит/с |
Использование подключения CAN bus может достигать максимальной дальности передачи 5000 метров. Он предоставляет сетевую схему, которая использует CAN bus для подключения нескольких контроллеров PMC007CxSxP на следующем рисунке, которые совместимы с CAN2.0A и CAN2.0B двумя техническими характеристиками и могут быть подключены к 127 узлам.
Примечание: рекомендуется использовать защитную витую пару CAN bus, указанную на 120 Ом, и концы витой пары должны подключаться к резистору с остановкой 120 Ом. Кроме того, PTA2C в схеме представляет собой USB-CAN модуль преобразования, предоставляемый третьей вечерние.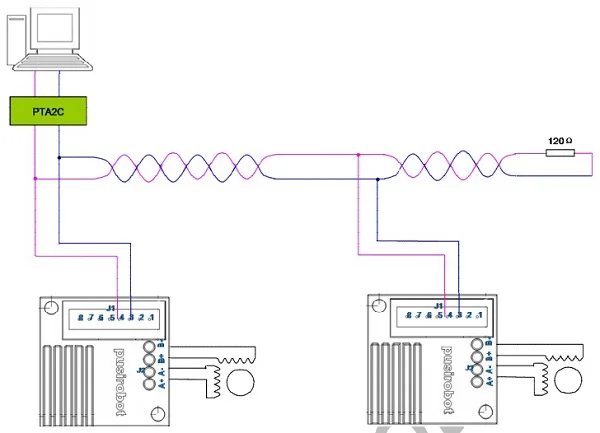
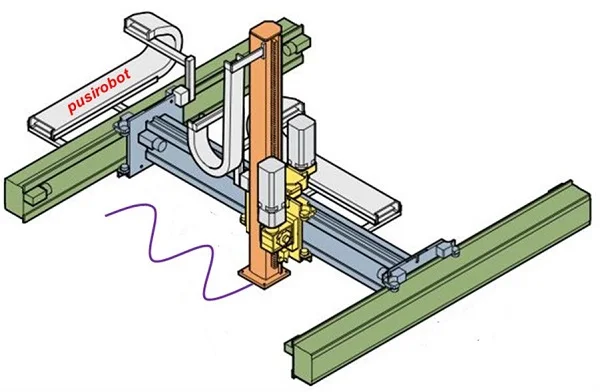
Контроллер PMC007 может быть настроен как PVT motion mode. В этом режиме контроллер использует Уникальный алгоритм оптимизации интерполяции кубических сплавов PUSIROBOT. В то же время точно контролируйте положение и скорость многоосевой оси, чтобы конечный механизм мог реализовать траекторию линии, дуги и сложной кривой, это важная особенность в роботизированной руке или многоосевом применении, как показано на рисунке ниже. В применении литературного творчества, Такие как плавающая шариковая матрица, часовая матрица, зонтичная матрица и т. д. для того, чтобы представить целостный вид, необходимо синхронизировать сотни осей. Контроллер PMC007 использует специальный алгоритм оптимизации, который может значительно уменьшить нагрузку на автобус и улучшить отклик в реальном времени.










Смотрите так же другие товары: