Радиоуправляемый передатчик и приемник Radiolink AT10II 12CH R12DS 2 4 ГГц DSSS & FHSS радиопульт
7 922,28 руб.




Новое поступление
Характеристики
*Текущая стоимость 12 515,65 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Feb-23-2026 | 15894.12 руб. | 16212.23 руб. | 16053 руб. |
| Jan-23-2026 | 12890.88 руб. | 13148.0 руб. | 13019 руб. |
| Dec-23-2025 | 15644.86 руб. | 15957.1 руб. | 15800.5 руб. |
| Nov-23-2025 | 15519.38 руб. | 15829.51 руб. | 15674 руб. |
| Oct-23-2025 | 12390.0 руб. | 12638.76 руб. | 12514 руб. |
| Sep-23-2025 | 15268.17 руб. | 15573.6 руб. | 15420.5 руб. |
| Aug-23-2025 | 15143.85 руб. | 15446.89 руб. | 15294.5 руб. |
| Jul-23-2025 | 15018.34 руб. | 15318.43 руб. | 15168 руб. |
Описание товара






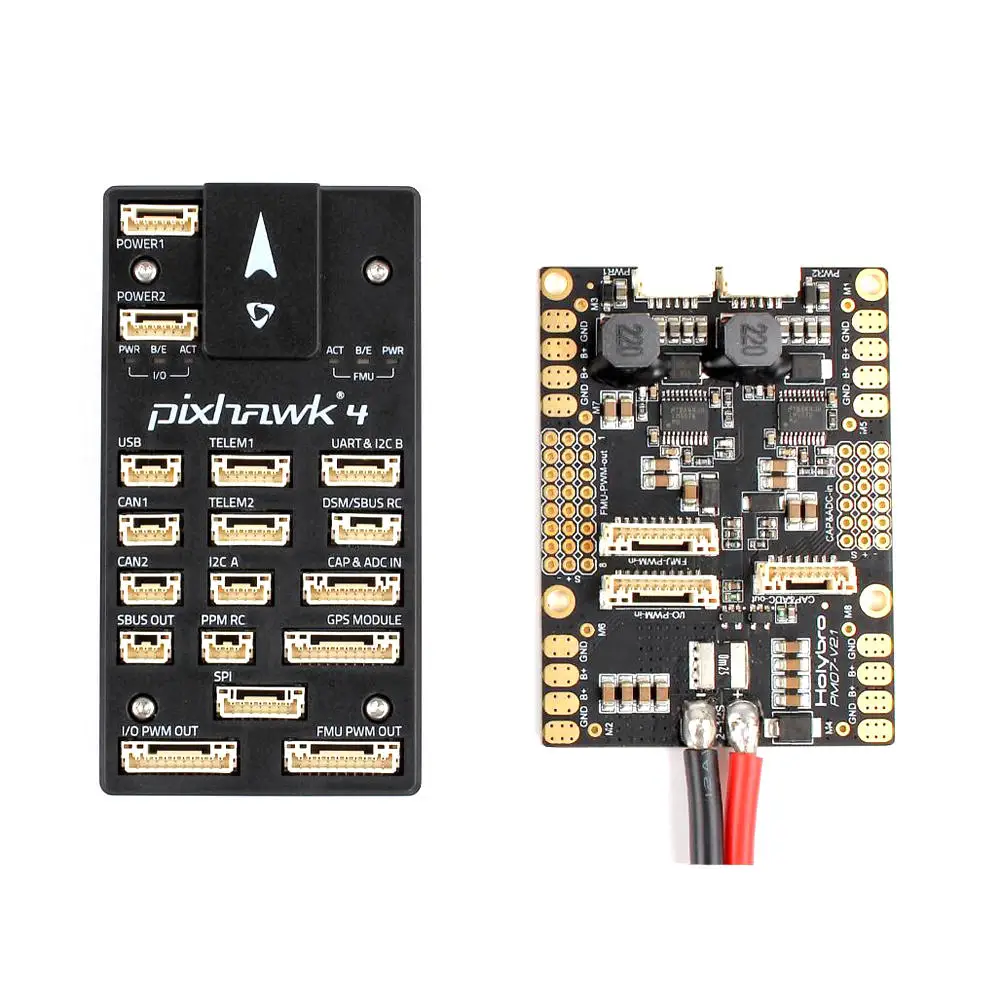
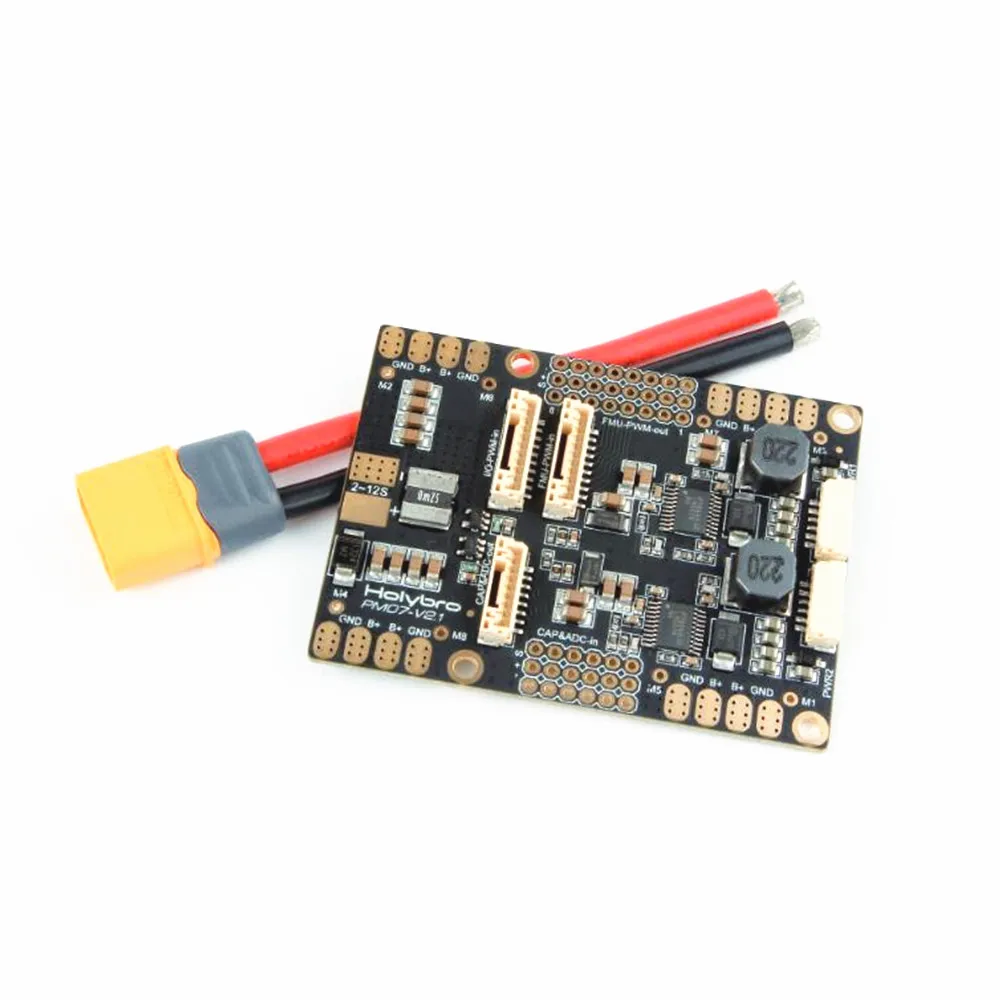
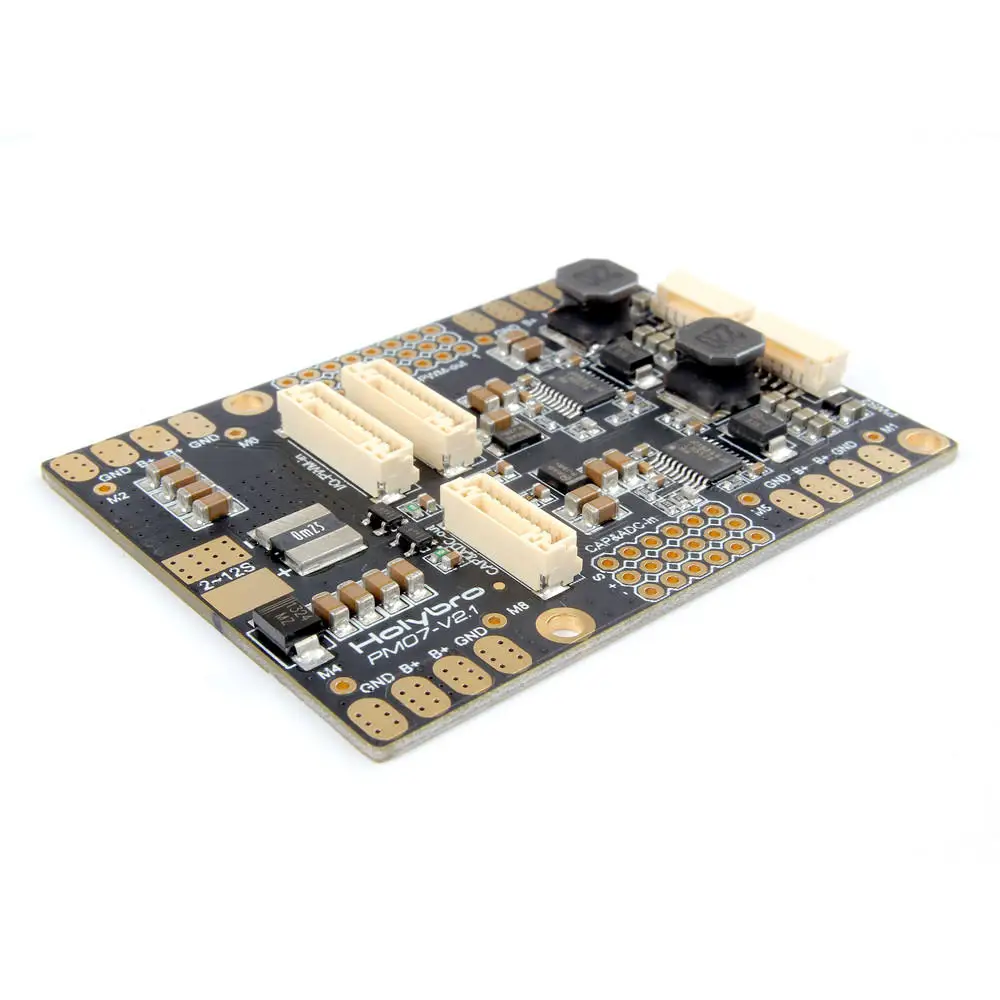
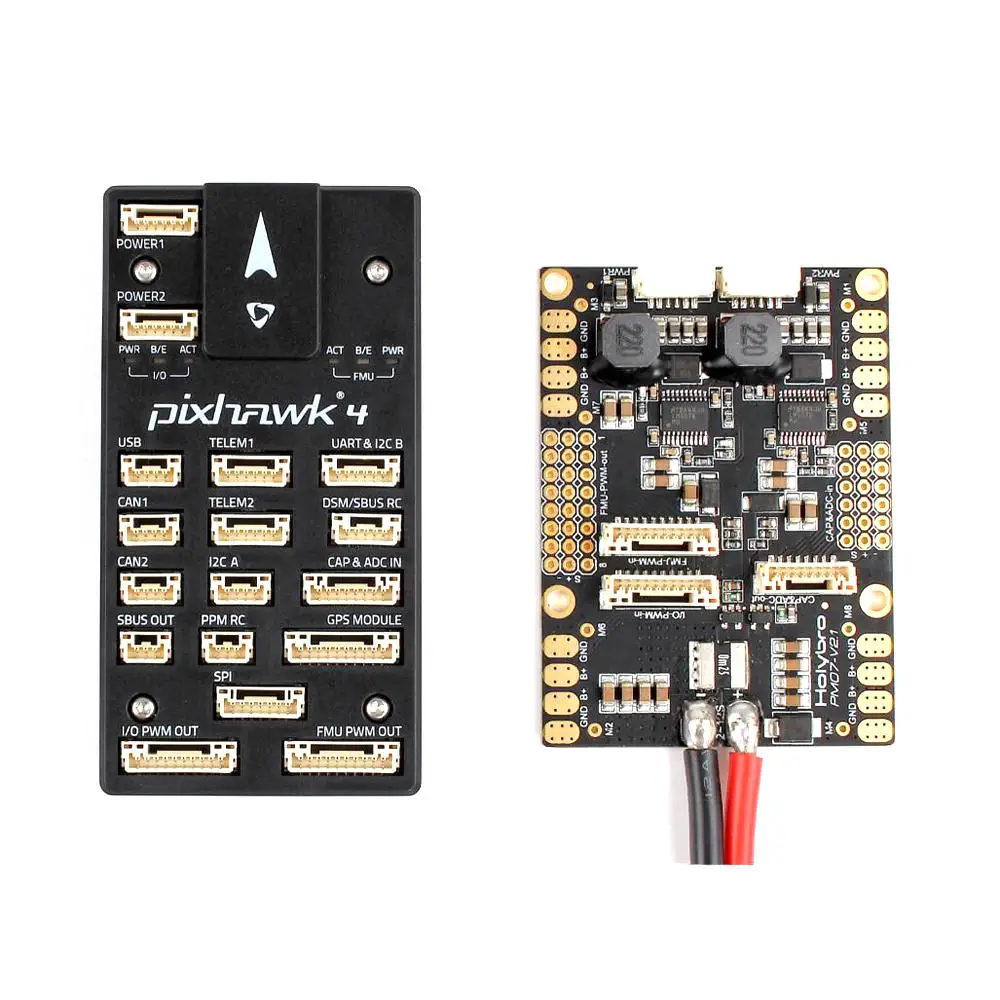
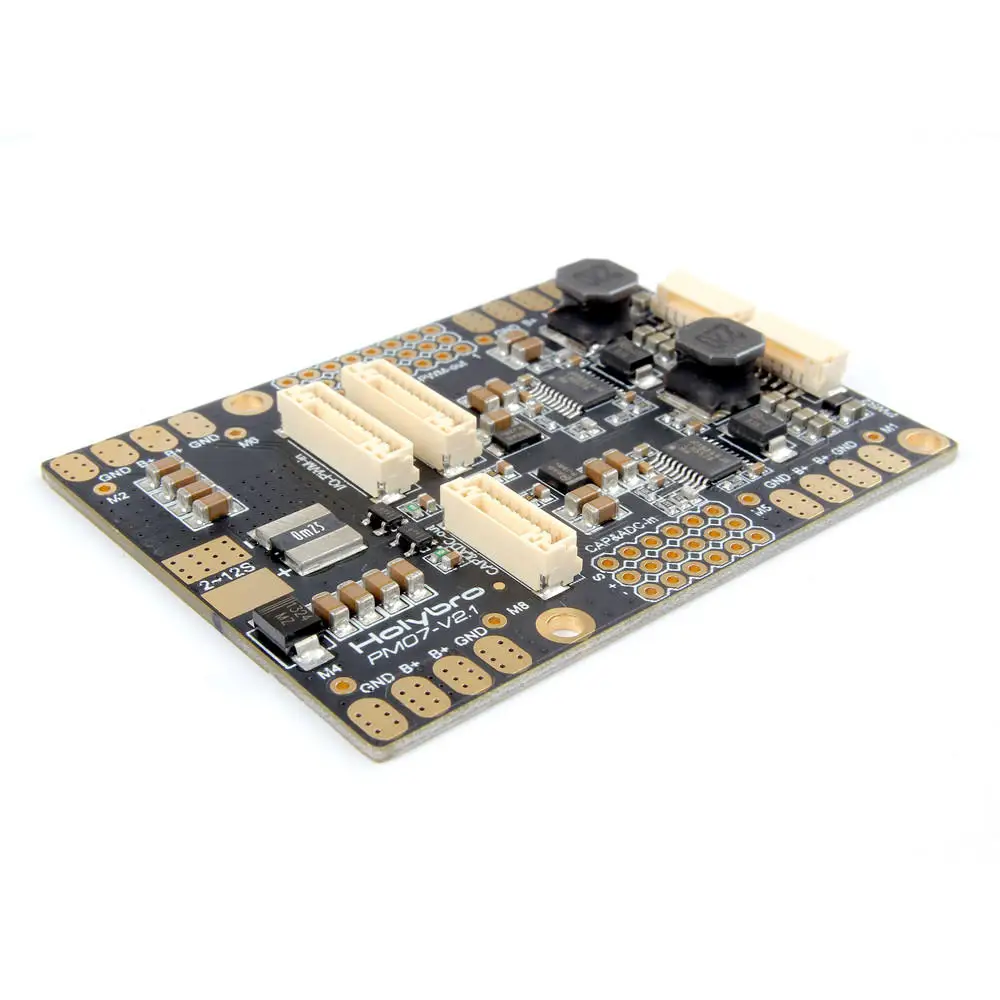
Holybro Pixhawk 4 Контроллер полета STM32F765 32 бит ARM w/ PM07 управление питанием 5V UBEC выход-пластиковый чехол
Характеристики продукта, новый и небольшой форм-фактор, больше вычислительной мощности и 2X оперативной памяти, чем предыдущие версии, новые датчики с более высокой температурной стабильностью, интегрированная изоляция вибраций, увеличенная простота использования: предустановленный с самым последним PX4 (v1.7), Дополнительные порты для лучшей интеграции и расширения Pixhawk 4-это Новейшее обновление для успешной семьи полетных контроллеров Pixhawk. Он разработан и разработан в сотрудничестве с Holybro и командой PX4, оптимизирован для запуска полного стека Dronecode и поставляется предварительно установленным с последней прошивкой PX4 (v1.7). Он оснащен самой передовой процессорной технологией от ST Microelectronics, сенсорной технологией от Bosch , InvenSense и операционной системой NuttX в реальном времени, обеспечивая невероятную производительность, гибкость, И надежность управления любым автономным транспортным средством. Микроконтроллер Pixwhawk 4 теперь имеет флэш-память 2 Мб и ОЗУ 512кб. Благодаря увеличенной мощности и ОЗУ разработчики могут быть более продуктивными и эффективными с помощью своей работы по разработке. На автопилоте могут быть реализованы более сложные Алгоритмы и модели. Высокая производительность, низкий уровень шума IMUs на борту предназначены для стабилизации приложений. Сигналы, готовые к передаче данных от всех датчиков, направляются для разделения контактов прерывания и таймера захвата на автопилоте, что обеспечивает точное время штамповки данных датчика. Недавно разработанные виброизоляции позволяют более точные показания, что позволяет транспортным средствам достичь лучших общих представлений полета. Два внешних SPI автобуса и шесть связанных чипов выбирают линии позволяют добавлять дополнительные датчики и SPI-interface Полезная нагрузка. В общей сложности четыре автобуса I2C, два предназначены для внешнего использования и два сгруппированы с последовательными портами для GPS/модули компаса. Набор для разработки автопилота Pixhawk 4 идеально подходит для разработчиков в корпоративных научно-исследовательских лабораториях, стартапах и для научных работников (исследователей, профессоров, студентов). Параметры: Система управления полетом Основной процессор FMU: STM32F765 32 бит Arm Cortex-M7, 216 МГц, 2 Мб памяти, 512кб RAM Процессор IO: STM32F100 32 бит Arm Cortex-M3, 24 МГц, 8 КБ SRAM Accel/Gyro: ICM-20689 Accel/Gyro: BMI055 Mag: IST8310 Барометр: MS5611 Размеры: 44x84x12mm Вес: пластиковый чехол: 33 г Алюминиевый Чехол: 44g Мощность Управление доска Фирменное наименование: HolyBro Модель: PM07 Наименование товара: Плата управления питанием PM w/ 5V BEC для контроллера полета Pixhawk 4 Выход UBEC: 5 В @ 3A UBEC Входное напряжение: 7-15 в (2-12 с) Размер: 68x50x8mm Монтажное отверстие: 45x45mm Вес: 36 г Интерфейсы 8-16 PWM Серводвигатель (8 от IO, 8 от FMU) 3 выделенных PWM/Ввод входов на FMU Выделенный вход R/C для CPPM Выделенный вход R/C для Spektrum / DSM и S.Bus с аналоговым/PWM RSSI входом Выделенный сервопривод S.Bus 5 последовательных портов общего назначения, 2 с контролем потока flil, 1 с отдельным ограничением тока 1.5A 3 I2C порты 4 шинам SPI До 2 CANBus для двойной банки с серийным ESC, каждый CANBus имеет индивидуальное бесшумное управление или управление ESC RX-MUX Аналоговые входы для напряжения/тока 2 батарей 2 дополнительных аналоговые входные сигналы Мощность модуль вывода: 4,9 ~ 5,5 V Максимальное входное напряжение: 6 В Макс. Датчик тока: 120A Входная мощность USB: 4,75 ~ 5,25 в Серводвигатель вход: 0 ~ 36 В Работая temp. ~ 40 ~ 85C Температура хранения. -40 ~ 85C CE FCC, аддитивного цветового пространства Соответствует RoHS (без свинца) Посылка включает в себя: Пластик чехол версия 1 x Pixhawk4 с Пластик чехол 1 x Панель управления питанием Pixhawk 4 1 x разделительная плата I2C 3x6-6 pin кабель (питание) 2x4 для 4 pin кабель (CAN) 1 х 6-4 pin кабель (кабель для передачи данных) 2x10-10 pin кабель (ШИМ) 1x8 до 8-ми штифтовый кабель (AUX) 1 x PPM/SBUS out кабель 1 x кабель приемника XSR 1 x Приемник DSMX кабель 1 x кабель приемника SBUS USB кабель (1 шт.); 1x6*3 2,54 мм Шаг горизонтальная стержневая 1x8*3 2,54 мм Шаг горизонтальная стержневая 1 x набор пены 1 x Руководство по быстрому запуску Pixhawk4 Руководство по быстрому запуску платы управления питанием-1 шт.
Смотрите так же другие товары: