
1 шт. алюминиевый M3 соединительный стержень шаровой шарнир рулевое соединение
48,23 - 49,72 руб.

Новое поступление

Магазина Motive Power Air model работает с 29.09.2013. его рейтинг составлет 94.27 баллов из 100. В избранное добавили 4846 покупателя. Средний рейтинг торваров продавца 4.8 в продаже представленно 1360 наименований товаров, успешно доставлено 10918 заказов. 2968 покупателей оставили отзывы о продавце.
Характеристики
*Текущая стоимость 1 213,26 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Feb-23-2026 | 1541.43 руб. | 1572.76 руб. | 1556.5 руб. |
| Jan-23-2026 | 1249.59 руб. | 1274.47 руб. | 1261.5 руб. |
| Dec-23-2025 | 1516.50 руб. | 1546.29 руб. | 1531 руб. |
| Nov-23-2025 | 1504.64 руб. | 1534.0 руб. | 1519 руб. |
| Oct-23-2025 | 1201.19 руб. | 1225.51 руб. | 1213 руб. |
| Sep-23-2025 | 1480.33 руб. | 1510.96 руб. | 1495 руб. |
| Aug-23-2025 | 1468.41 руб. | 1497.11 руб. | 1482.5 руб. |
| Jul-23-2025 | 1456.79 руб. | 1485.92 руб. | 1470.5 руб. |
Описание товара




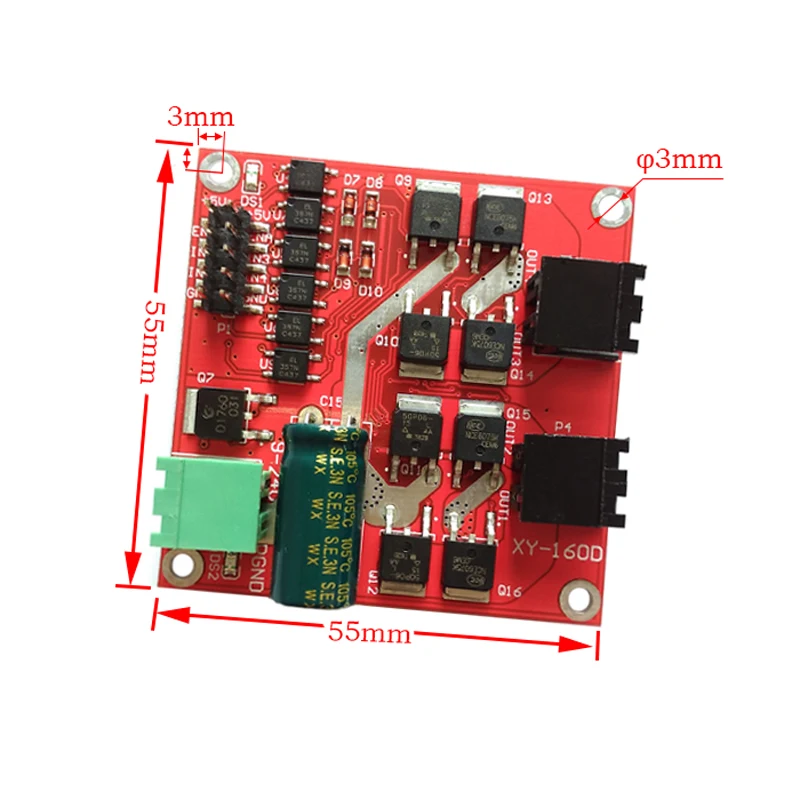
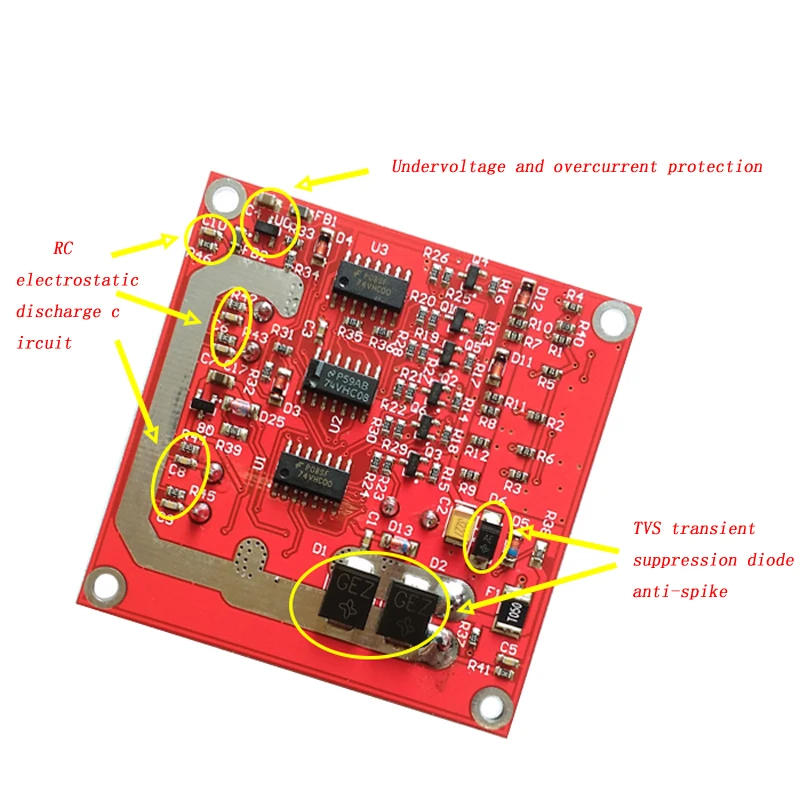
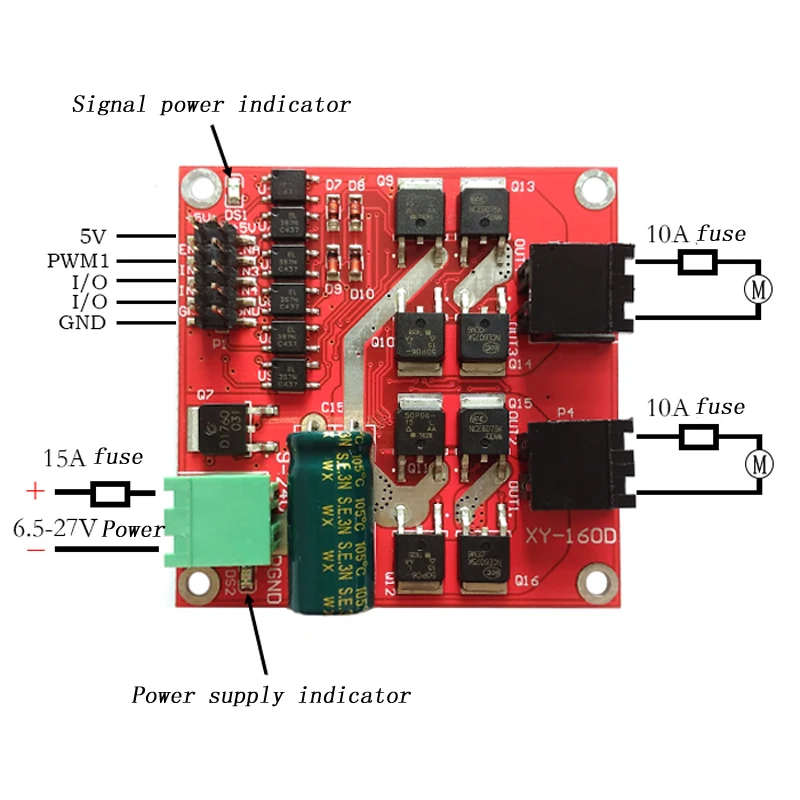
1 шт. 7A 160 Вт двухполосный модуль привода двигателя постоянного тока положительный/Обратный ШИМ контроллер скорости L298 логическая 160D печатная плата для радиоуправляемой модели Особенности -Очень маленький размер, Всего 5,5 см × 5,5 см -Поддержка напряжения 7-24 В, защита от пониженного напряжения, подавление переходных помех источника питания -Двусторонний моторный интерфейс, Номинальный выходной ток каждого канала 7а -Аналогично логике управления L298, каждый канал поддерживает три провода управления включить, вперед и назад и тормоза -Включить сигнал может быть подключен к внешнему PWM, положительный и отрицательный сигнал управления может быть подключен в серии концевого переключателя -Управляемый сигнал использует режим токового привода для поддержки большинства одночиповых микрокомпьютеров -Используйте оптопары для изоляции всех сигналов управления -Есть схема статического разряда Обзор принципа Модуль h-моста использует комбинацию цепи ворот и трубки MOS для реализации двигателя вперед и назад, тормоза и контроля скорости. И большой выходной ток, и L298 логика гибкого управления сигналом. Метод обработки помех: контроль изоляции оптопары сигнала, подавление напряжения шипа источника питания. Логика управления сигналом: Используйте ворота для реализации логики управления L298-like. Метод реализации h-моста: h-мост реализуется с помощью P и N дополнительных MOS трубок. Защита от низкого напряжения источника питания: защита от пониженного напряжения достигается с помощью чипа сброса. Технические параметры -Диапазон входного напряжения: 6,5 В постоянного тока-27 в -Номинальное входное напряжение: 12 В/24 В постоянного тока -Количество выходных каналов: 2 способа -Номинальный выходной ток на канал: 7A -Пиковый выходной ток на канал: 50A -Номинальная выходная мощность на канал: 84 Вт (12 в источник питания), 168 Вт (24 В источник питания) -Напряжение управляемого сигнала: 3 ~ 6,5 В -Каждый контрольный ток сигнала: 3 ~ 11 мА -Поддержка частотного диапазона ШИМ: 0 ~ 10 кГц -Минимальная Эффективная ширина импульса PWM: 10 US -Рабочая температура: -25 градусов до 80 градусов -Размеры: 5,5 см × 5,5 см × 2,0 см Подходит для параметров двигателя -Для двигателей с номинальным напряжением 24 В подходит для определения номинальной мощности 115 Вт и ниже или номинального тока 7A или менее. -Для двигателей с номинальным напряжением 12 В, подходит для номинальной мощности 40 Вт и ниже или номинальным током 7А или менее для длительной полной работы двигателя -Драйвер может выводить Номинальный ток для 7А в течение длительного времени, но Номинальная мощность, отмеченная на двигателе, обычно относится к выходной мощности. Учитывая потери работы двигателя, эффективность двигателя следует учитывать при расчете номинального тока, номинального тока = номинальной мощности/номинального напряжения/эффективности Типичный пример подключения 1. С помощью микрокомпьютера с одним чипом для управления методом вращения двигателя Блок питания MCU и контрольный сигнал платы драйвера должны быть заземлены вместе, но не с питанием двигателя PGND. При использовании микроконтроллера 5 в плата драйвера + 5 В подключается к источнику питания + 5 В; При использовании микроконтроллера 3,3 В, плата драйвера + 5 В подключается к источнику питания 3,3 В. Управляющие сигналы микроконтроллера и платы драйвера могут совместно использовать один источник питания или быть автономными (но должно быть общим). Эна подключена к выходному порту GPIO или PWM MCU. Когда Эна высока, плата драйвера включена, положительный и отрицательный или тормоз эффективен. Если это PWM сигнал, двигатель может быть отрегулирован. Когда низкий уровень, привод платы отключен, и интерфейс двигателя не имеет выхода. 1 и IN2 подключены к двум GPIOs MCU (может поддерживать любой порт IO 51 MCU, не требуется резистор тяги), Управляйте двигателем для обратного и тормозного хода, логика привода показана в логической таблице.  2. Используйте кнопку для управления двигателем вперед и назад метод проводки Среди них PB1 и PB2-две кнопки. Когда PB2 нажата и PB1 не нажимается, IN1 высокий, IN2 низкий, и двигатель вращается вперед; Когда PB2 нажата и PB1 не нажата, В 1 низкий и в 2 высокий. Двигатель повернут вспять; Когда оба PB1 и PB2 прессованы или оба подняты, IN2 и IN2 низкий или высокий, и тормоза двигателя (или тормоза). Логика управляющего сигнала показана в логической таблице.
2. Используйте кнопку для управления двигателем вперед и назад метод проводки Среди них PB1 и PB2-две кнопки. Когда PB2 нажата и PB1 не нажимается, IN1 высокий, IN2 низкий, и двигатель вращается вперед; Когда PB2 нажата и PB1 не нажата, В 1 низкий и в 2 высокий. Двигатель повернут вспять; Когда оба PB1 и PB2 прессованы или оба подняты, IN2 и IN2 низкий или высокий, и тормоза двигателя (или тормоза). Логика управляющего сигнала показана в логической таблице.  Меры предосторожности 1) Источник питания драйвера не должен быть изменен. Рекомендуется подключить предохранитель 15A в серии на интерфейсе питания. Напряжение должно быть между 6,5 и 27 в. Если напряжение превышает напряжение, питание может сжечь модуль привода. 2) рекомендуется, чтобы Номинальный выходной ток источника питания был более чем в 2 раза больше номинального тока двигателя, чтобы предотвратить питание от подачи тока, необходимого для двигателя, чтобы привести к падению напряжения питания, Так что напряжение источника питания не достигает входного напряжения, необходимого драйверу, так что модуль привода выполняет защиту от низкого напряжения. Сломанный выход приводит к остановке двигателя. 3) Интерфейс двигателя не должен быть короткого замыкания, в противном случае модуль привода может быть сожжен. Рекомендуется подключить предохранитель 10A к интерфейсу двигателя. 5) Драйвер должен быть подключен к двигателю перед включением, чтобы предотвратить случайное короткое замыкание и сжечь модуль привода. 6) будьте осторожны, чтобы не промокать. Не замыкайте компоненты на приводной плате. Не прикасайтесь к штифтам и прокладкам компонентов на доске. В комплект входит: Модуль привода-1 шт.
Меры предосторожности 1) Источник питания драйвера не должен быть изменен. Рекомендуется подключить предохранитель 15A в серии на интерфейсе питания. Напряжение должно быть между 6,5 и 27 в. Если напряжение превышает напряжение, питание может сжечь модуль привода. 2) рекомендуется, чтобы Номинальный выходной ток источника питания был более чем в 2 раза больше номинального тока двигателя, чтобы предотвратить питание от подачи тока, необходимого для двигателя, чтобы привести к падению напряжения питания, Так что напряжение источника питания не достигает входного напряжения, необходимого драйверу, так что модуль привода выполняет защиту от низкого напряжения. Сломанный выход приводит к остановке двигателя. 3) Интерфейс двигателя не должен быть короткого замыкания, в противном случае модуль привода может быть сожжен. Рекомендуется подключить предохранитель 10A к интерфейсу двигателя. 5) Драйвер должен быть подключен к двигателю перед включением, чтобы предотвратить случайное короткое замыкание и сжечь модуль привода. 6) будьте осторожны, чтобы не промокать. Не замыкайте компоненты на приводной плате. Не прикасайтесь к штифтам и прокладкам компонентов на доске. В комплект входит: Модуль привода-1 шт. 






Смотрите так же другие товары:






