
Рамка для квадрокоптера из углеродного волокна 1 5 х400х500 мм 2 шт.|carbon fiber plate|frame carbon
12 711,65 руб.




Новое поступление

Магазина ShenZhen MiaoZheng Technology Co., Ltd работает с 29.04.2015. его рейтинг составлет 92.3 баллов из 100. В избранное добавили 3411 покупателя. Средний рейтинг торваров продавца 4.7 в продаже представленно 1127 наименований товаров, успешно доставлено 12549 заказов. 1780 покупателей оставили отзывы о продавце.
Характеристики
*Текущая стоимость 599,67 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Feb-21-2026 | 761.12 руб. | 776.67 руб. | 768.5 руб. |
| Jan-21-2026 | 617.61 руб. | 629.89 руб. | 623 руб. |
| Dec-21-2025 | 749.98 руб. | 764.1 руб. | 756.5 руб. |
| Nov-21-2025 | 743.75 руб. | 758.2 руб. | 750.5 руб. |
| Oct-21-2025 | 593.14 руб. | 605.39 руб. | 599 руб. |
| Sep-21-2025 | 731.92 руб. | 746.8 руб. | 738.5 руб. |
| Aug-21-2025 | 725.85 руб. | 740.90 руб. | 732.5 руб. |
| Jul-21-2025 | 719.75 руб. | 733.63 руб. | 726 руб. |
Описание товара






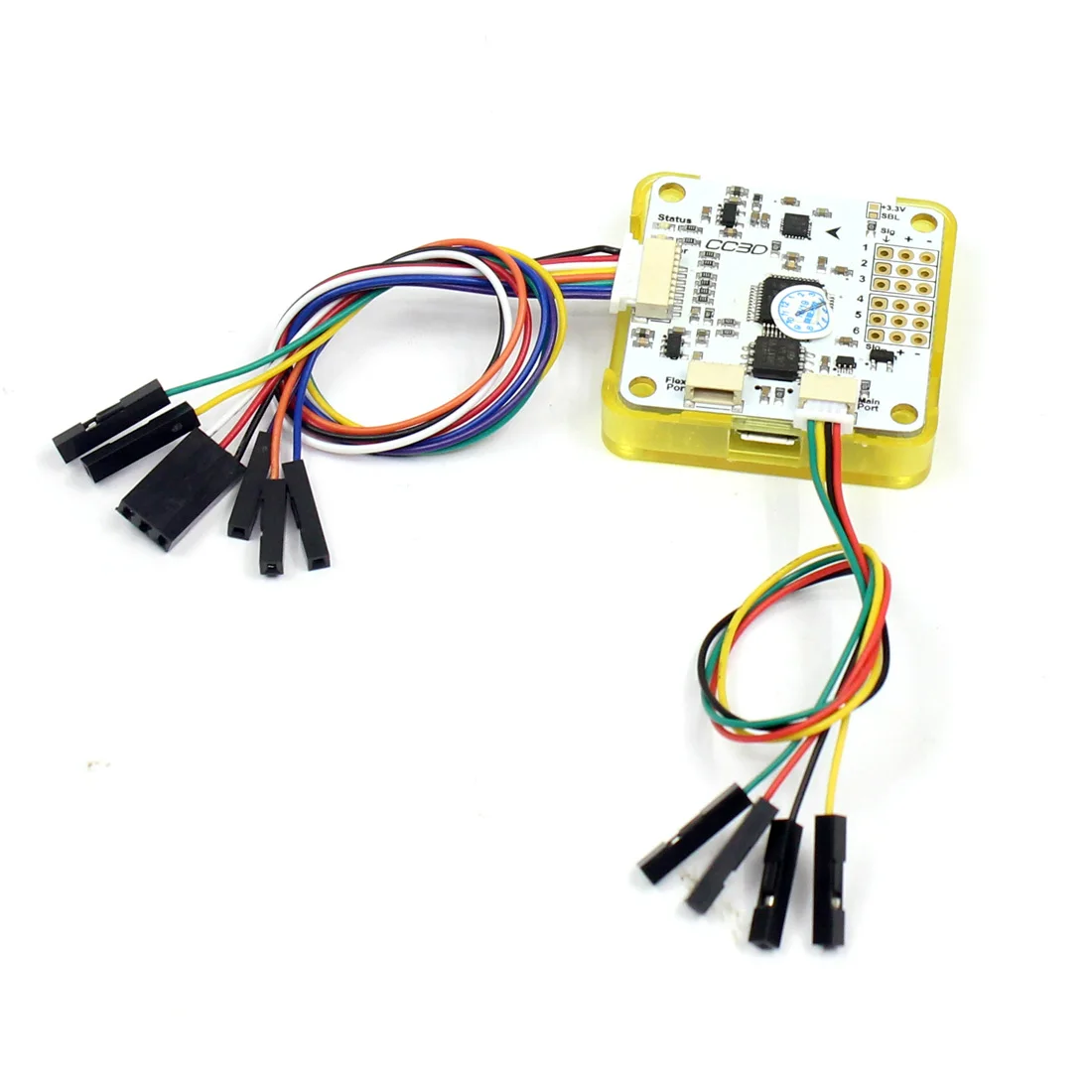
Прямой штырь и изогнутый штырь 2 версии опционально
Плата CC3D-RAID поставляется с желтым корпусом
Спецификация продукта
Размер корпуса: 40 мм * 40 мм * 14 мм
С корпусом Вес: 15,2 г
Размер платы: 36 мм * 36 мм
Вес нетто: 7,3 г
CC3D-RAID исходит из оригинального чипа CC3D, оптимизирует макет печатной платы и заменяет более продвинутые Гироскопы;
Это меняет неудобство оригинального порта Mirco USB;
Новый CC3D использует наземную станцию Betaflight, а также настройки прошивки и параметров, что проще, чем оригинальный Openpilot.
Идеальная функция, подходит для начинающих, легче для опытных игроков.
Его функция прочнее обычных F3.
Примечание: Этот Контроллер полета не поддерживает прошивку Openpilot. Поддерживаются только прошивка Betaflight и программное обеспечение для отладки.
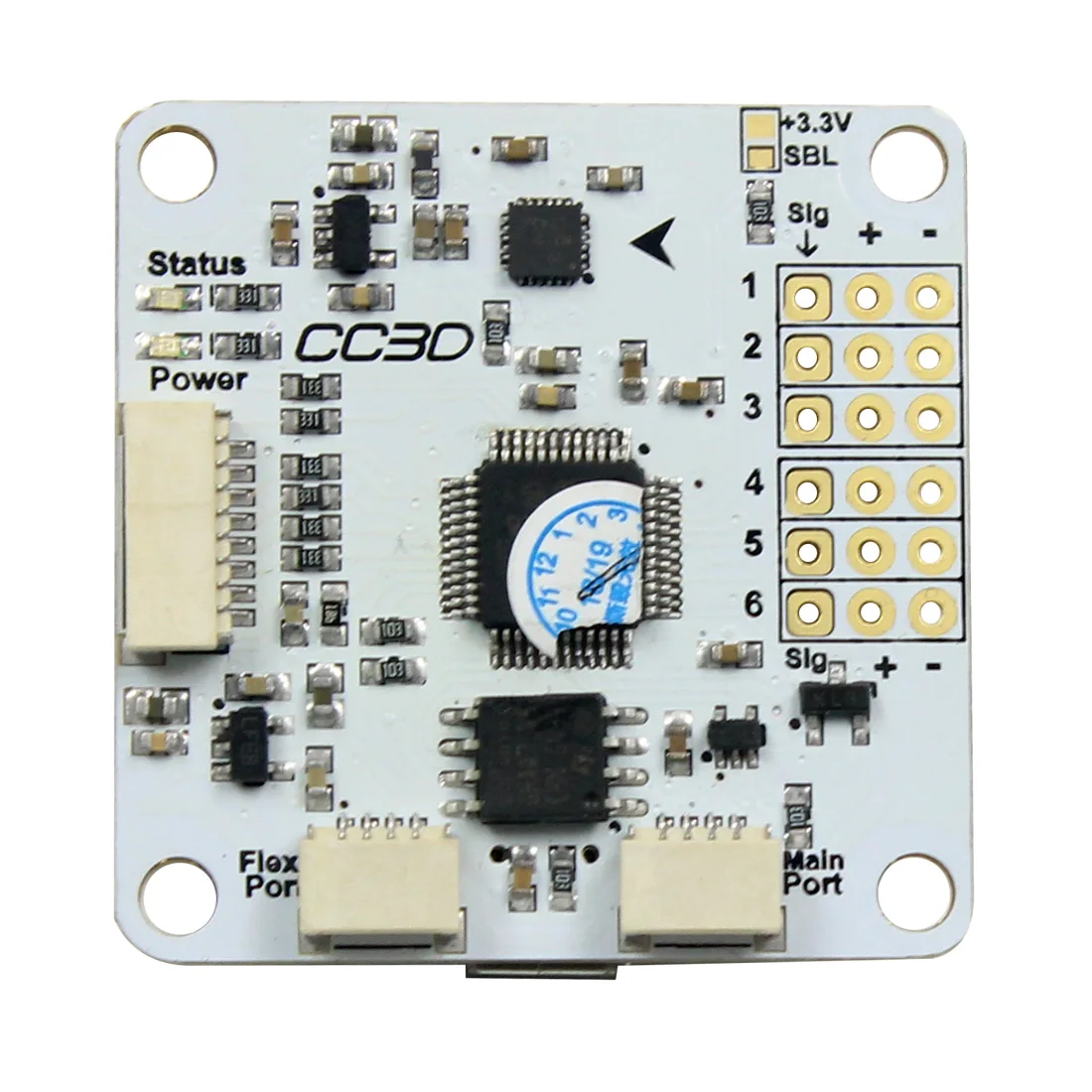
OpenPilot Copter Control 3D aka CC3D-это плата, более настроенная на Акробатический Летающий аппарат или на основе GPS. Он имеет только один датчик, MPU6500 (быстрый SPI) на основе Acc/Gyro. Он также имеет 16 Мбит SPI на основе EEPROM чип. Он имеет 6 портов, маркированных как входы (по одному контакту каждый) и 6 портов, маркированных как выходы двигателя/сервопривода (по 3 контакта каждый).
Если проблемы обнаружены с этой платой, пожалуйста, сообщите через Github отслеживания проблем.Плата имеет usb-порт, непосредственно подключенный к процессору. Другие платы, такие как Naze и Flip32, имеют встроенный usb-адаптер uart, который подключается к последовательному порту процессора.
В настоящее время плата не может использоваться для гексакоптеров/октокоптеров.
Поддержка tricптера и самолета не протестирована, пожалуйста, сообщите об этом, если вы попытайтесь.
Выводов
8 pin RC_Input разъем имеет следующие выводов при использовании в RX_PPM/RX_SERIAL режим
Pin-код | Функция | Примечания |
-1 шт. | Заземления | |
2 | + 5В | |
3 | Неиспользованный | |
4 | Софтсериал 1 TX / Sonar триггер | |
5 | Софтсериал 1 RX / Sonar Echo / RSSI_ADC | Используется либо для софтсерийного, гидролокатора или RSSI_ADC *. В любое время можно включить только одну функцию. |
6 | В настоящее время | Включите функцию CURRENT_METER. Подключение к выходу датчика тока, 0v-3,3 v вход |
7 | Датчик напряжения аккумуляторной батареи | Включите функцию VBAT. Подключение к основной батарее с помощью делителя напряжения, 0v-3,3 v вход |
8 | PPM вход | Включите функцию RX_PPM |
* Подключение к выходу PWM-RSSI кондиционера, 0v-3,3 v вход.
6 pin RC_Output разъем имеет следующие выводов при использовании в RX_PPM/RX_SERIAL режим
Pin-код | Функция | Примечания |
-1 шт. | Мотор-1 шт. | |
2 | Двигатель 2 | |
3 | Мотор 3 | |
4 | Двигатель 4 | |
5 | Светодиодная лента | |
6 | Неиспользованный |
8 pin RC_Input разъем имеет следующие выводов при использовании в RX_PARALLEL_PWM режим
Pin-код | Функция | Примечания |
-1 шт. | Заземления | |
2 | + 5В | |
3 | Неиспользованный | |
4 | CH1 | |
5 | CH2 | |
6 | CH3 | |
7 | CH4/датчик напряжения батареи | CH4 если датчик напряжения батареи отключен |
8 | CH5/CH4 | CH4 если монитор напряжения батареи включен |
6 pin RC_Output разъем имеет следующие выводов при использовании в RX_PARALLEL_PWM режим
Pin-код | Функция | Примечания |
-1 шт. | Мотор-1 шт. | |
2 | Двигатель 2 | |
3 | Мотор 3 | |
4 | Двигатель 4 | |
5 | Неиспользованный | |
6 | Неиспользованный |
Последовательный порт
Соотношение цена/качество | Идентификатор | Доска для маркировки | Примечания |
-1 шт. | ПДС | USB порт | |
2 | USART1 | Главный порт | Подключен к контроллерному инвертору MCU |
3 | USART3 | Флекс | |
4 | SoftSerial | RC соединитель | Контакты 4 и 5 (Tx и Rx соответственно) |
Порт SoftSerial недоступен при использовании RX_PARALLEL_PWM. Скорость передачи данных ограничена 19200 aud.
Для подключения графического интерфейса к контроллеру полета вам просто нужен usb-кабель для использования виртуального com-порта (VCP) или можно использовать UART1 (основной порт).
Доступ к CLI доступен только через VCP по умолчанию.
Главный порт
По умолчанию основной порт поддерживает MSP.
Основной порт подключен к инвертору, который автоматически включается по мере необходимости. Например, если основной порт используется для SBus Serial RX, то внешний инвертор не требуется.
Флекс
Гибкий порт будет включен в режиме iec, если не используется USART3. К этому порту можно подключить внешние датчики и дисплеи iec.
Вы не можете использовать USART3 и iec одновременно.
Флекс разводки выводов
Pin-код | Сигнал | Примечания |
-1 шт. | GND | |
2 | VCC нерегулируемый | |
3 | Iec SCL / UART3 TX | 3,3 v level |
4 | Iec SDA / UART3 RX | 3,3 В уровня (5v толерантный |
Смотрите так же другие товары:






