
Высококлассное углеродное волокно FEICHAO T-Series Винт квадрокоптера 1255 12*5 5 Prop CW CCW для
311,74 руб.


Новое поступление
Характеристики
*Текущая стоимость уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Mar-21-2026 | 0.61 руб. | 0.14 руб. | 0 руб. |
| Feb-21-2026 | 0.13 руб. | 0.33 руб. | 0 руб. |
| Jan-21-2026 | 0.87 руб. | 0.33 руб. | 0 руб. |
| Dec-21-2025 | 0.25 руб. | 0.34 руб. | 0 руб. |
| Nov-21-2025 | 0.66 руб. | 0.19 руб. | 0 руб. |
| Oct-21-2025 | 0.37 руб. | 0.8 руб. | 0 руб. |
| Sep-21-2025 | 0.88 руб. | 0.28 руб. | 0 руб. |
| Aug-21-2025 | 0.77 руб. | 0.79 руб. | 0 руб. |
| Jul-21-2025 | 0.84 руб. | 0.41 руб. | 0 руб. |
Описание товара





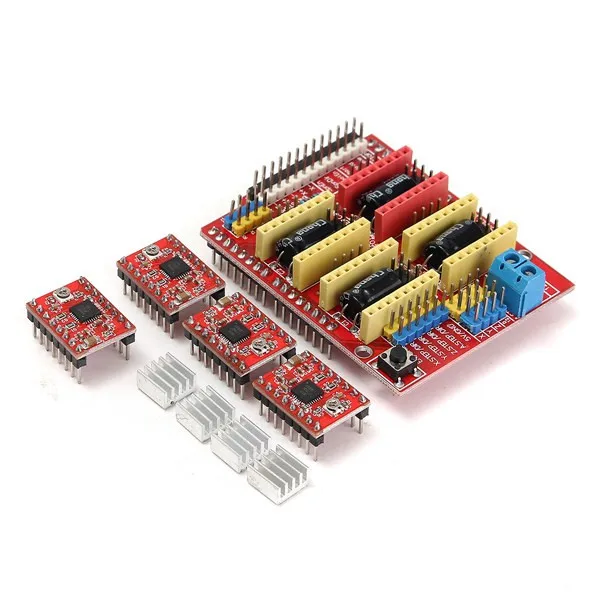
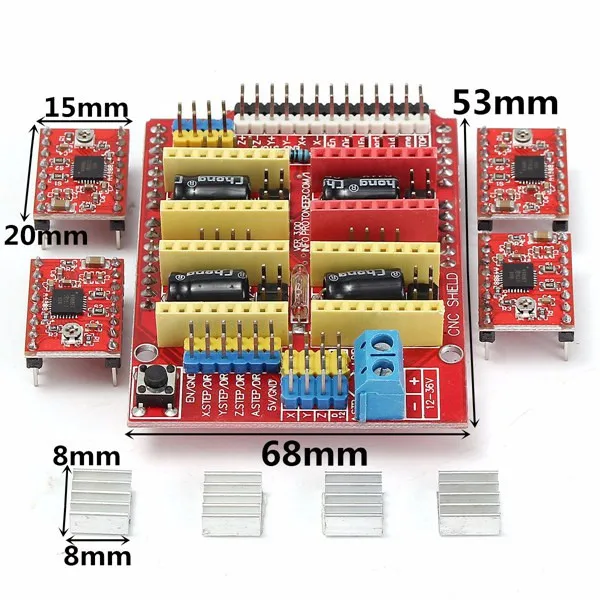
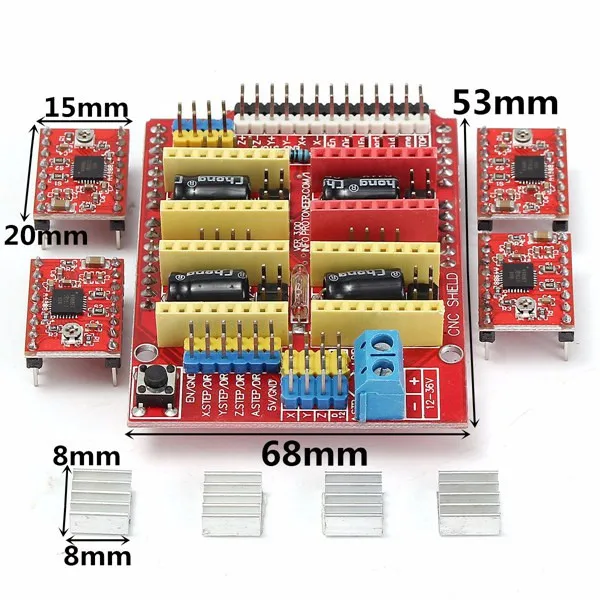
Гравер с ЧПУ щит доска



Код образца
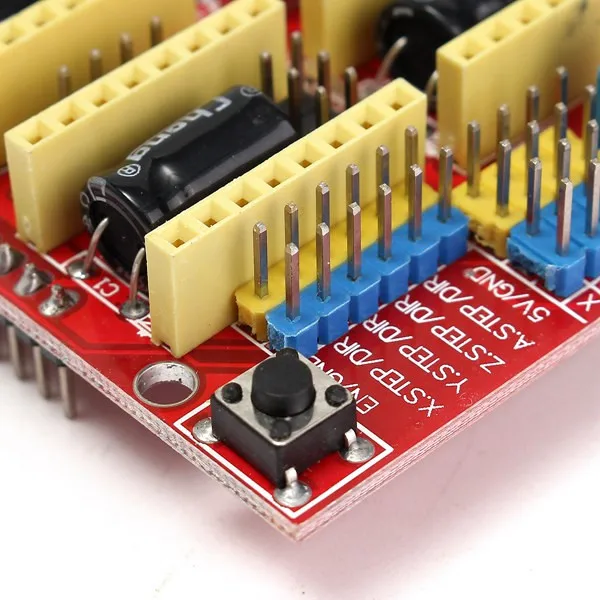
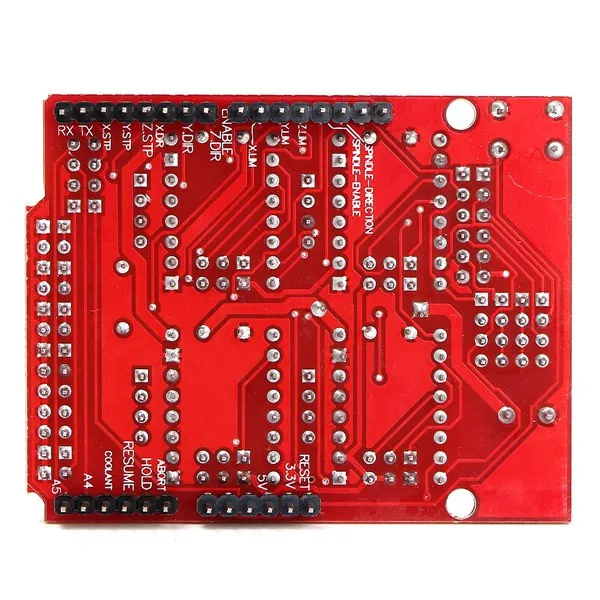
Первый, введение Эта плата расширения в качестве платы расширения драйвера, используется для гравировальных машин, 3D-принтеров. Это в общей сложности четыре слота, может управлять четырьмя шаговыми двигателями A4988. Для каждого дорожного шагового двигателя требуется только два порта IO. Другими словами, шесть портов IO можно хорошо управлять тремя шаговыми двигателями. Очень удобно в использовании. Два, UNO для модуля IO порт соответствие введение. Соответствующий рис. Выше UNO ------------------- Плата расширения 8 ------------------------- EN (Драйвер шагового двигателя включен, активный низкий) 7 --------------------- Z.DIR (управление направлением оси Z) 6 -------------------- Y.DIR (управление направлением оси Y) 5 --------------------- X.DIR (управление направлением по оси X) 4 --------------------- Z. Шаг (шаговый контроль оси Z) 3 -------------------- Y. Шаг (шаговый контроль оси Y) 2 -------------------- X. Шаг (шаговый контроль по оси X) /Ниже приведены простые процедуры управления шаговым двигателем, # Define EN 8/шаговый двигатель включен, активный низкий # Define X_DIR 5/X -axis шаговый двигатель управление направлением # Define Y_DIR 6/y -axis шаговый двигатель управление направлением # Define Z_DIR 7/z оси шагового двигателя управления направлением # Define X_STP 2/x -axis шаговый контроль # Define Y_STP 3/y -axis шаговый контроль # Define Z_STP 4/z -axis шаговый контроль /* /Функция: шаг. Функция: чтобы контролировать направление шагового двигателя, количество шагов. /Параметры: dir управление направлением, dirPin соответствующий шаговый двигатель DIR pin , stepperPin соответствующий шаговый двигатель «шаг» pin, номер шага без возвращаемого значения. */ Шаг пустоты (булевое dir, байтовый dirPin, байтовый шаг, шаги int) { DigitalWrite (dirPin, dir); Задержка (50); Для (int i = 0; i DigitalWrite (stepperPin, HIGH); DelayMicroseconds (800); DigitalWrite (stepperPin, LOW); DelayMicroseconds (800); } } Установка void () {/шаговый двигатель, используемый в IO pin, настроен на выход PinMode (X_DIR, OUTPUT); pinMode (X_STP, OUTPUT); PinMode (Y_DIR, OUTPUT); pinMode (Y_STP, OUTPUT); PinMode (Z_DIR, OUTPUT); pinMode (Z_STP, OUTPUT); PinMode (EN, OUTPUT); DigitalWrite (EN, LOW); }
Смотрите так же другие товары:






