
AMS1117 1 5 V (4 75 12V) выход понижающий модуль питания 1.5V|Интегральные схемы| |
9,80 руб.

Новое поступление
Характеристики
*Текущая стоимость 101,79 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Feb-22-2026 | 128.75 руб. | 131.96 руб. | 129.5 руб. |
| Jan-22-2026 | 104.25 руб. | 106.84 руб. | 105 руб. |
| Dec-22-2025 | 126.9 руб. | 129.2 руб. | 127.5 руб. |
| Nov-22-2025 | 125.74 руб. | 128.80 руб. | 126.5 руб. |
| Oct-22-2025 | 100.75 руб. | 102.80 руб. | 101 руб. |
| Sep-22-2025 | 123.46 руб. | 125.60 руб. | 124 руб. |
| Aug-22-2025 | 122.25 руб. | 124.77 руб. | 123 руб. |
| Jul-22-2025 | 121.73 руб. | 123.36 руб. | 122 руб. |
Описание товара







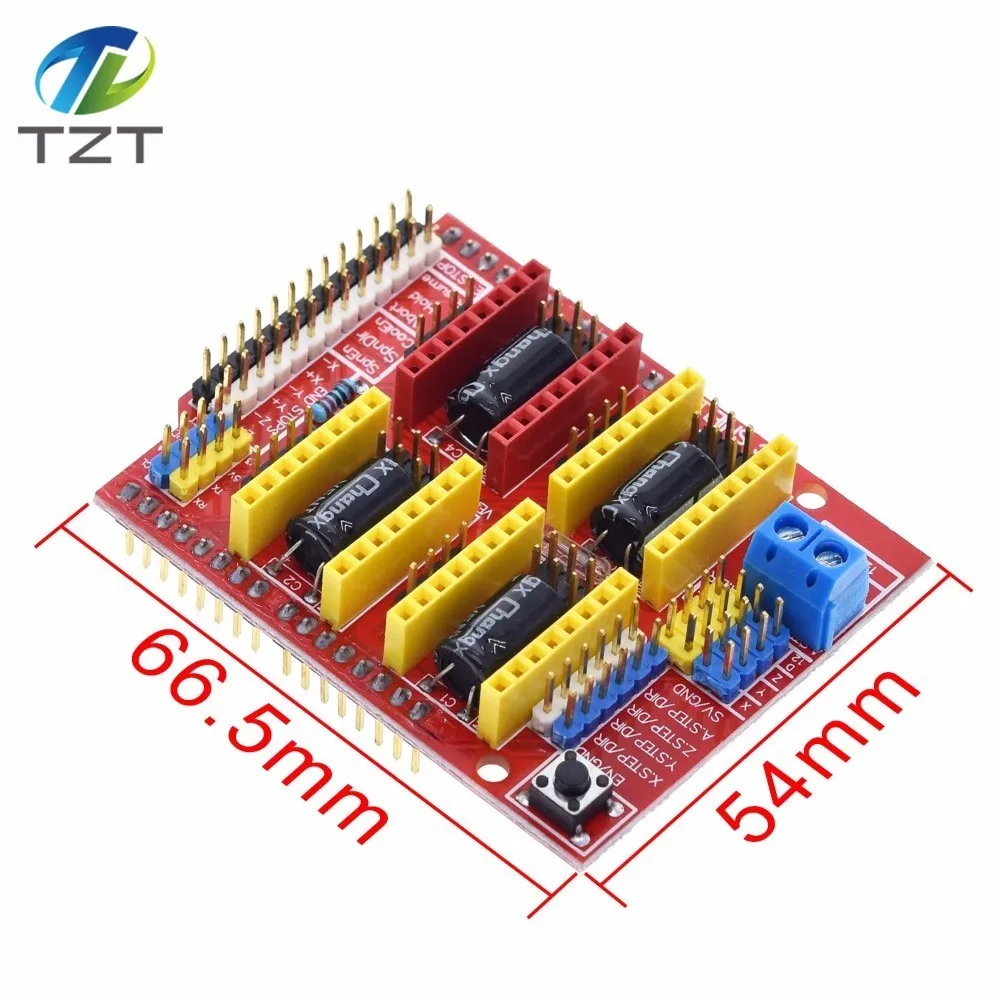
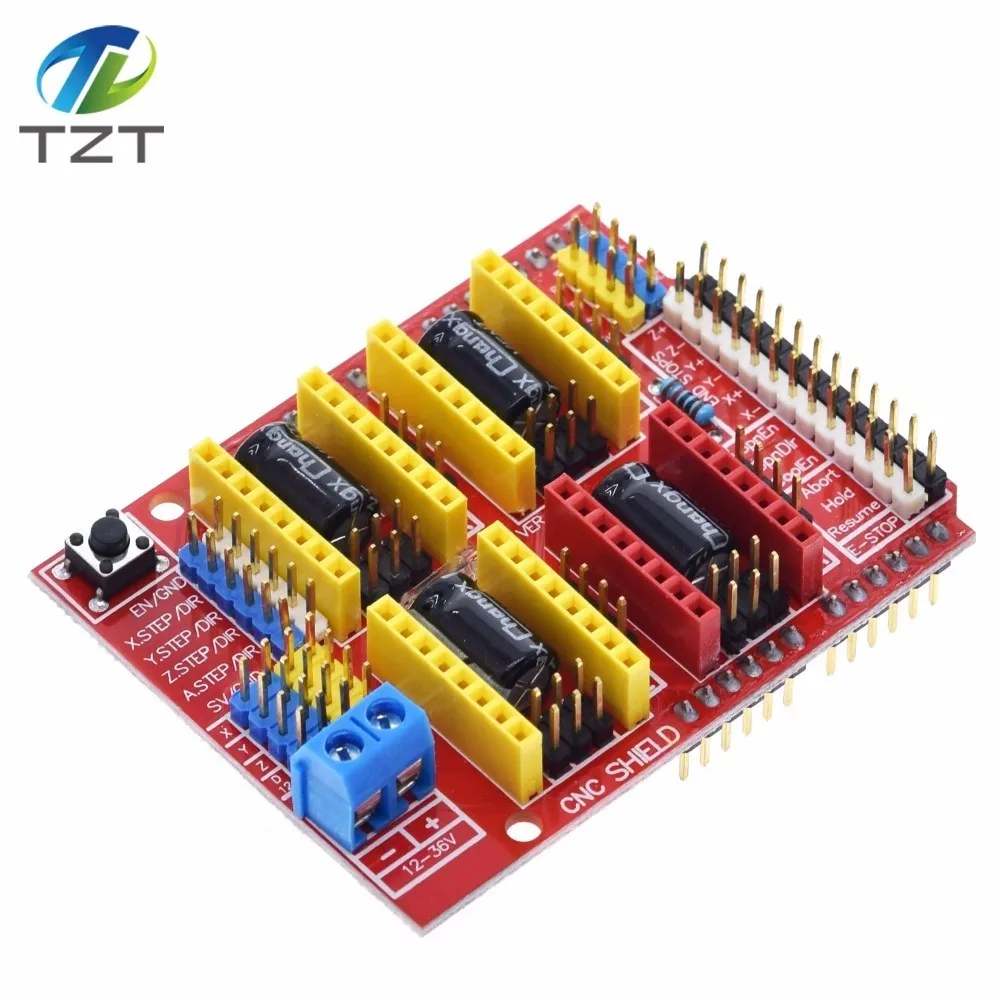
II.UNOИ модульIOСоответствие между портом введения
Основные потребности Шагового управления двигателем другие штифты находятся в гравировальной машине, или3DКогда принтер был использован, мы здесь не предоставляем подробности,IOСоответствует рисунку выше.
Плата расширения UNO ----------------------
8 ------------------------ EN (включение шагового двигателя, активный низкий уровень)
7----------------------- Z.DIR (управление направлением по оси Z)
6----------------------- Y.DIR (управление направлением по оси Y)
5----------------------- X.DIR (управление направлением по оси X)
4 ---------------------- шаг Z. (шаговое Управление по оси Z)
3 ---------------------- шаг Y. (шаговый контроль по оси Y)
2 ---------------------- шаг X. (X-axis stepper control)
// Вот простые процедуры управления шаговым двигателем,
# Define EN 8 // доступен шаговый двигатель, активный низкий уровень
# Define X_DIR 5 // управление шаговым мотором по оси X
# Define Y_DIR 6 // управление шаговым мотором по оси y
# Define Z_DIR 7 // управление шаговым мотором по оси z
# Define X_STP 2 // x-axis stepper control
# Define Y_STP 3 // шаговое Управление по оси y
# Define Z_STP 4 // шаговое Управление по оси z
/*
// Функция: функция шага: для управления направлением шагового двигателя, количеством шагов.
// Параметры: управление направлением dir, контактный разъем DIR, соответствующий шаговому двигателю, шаговый контакт tepperpin, соответствующий шаговому двигателю, выполняет несколько шагов.
// Нет стоимости возврата
*/
Шаг void (каталог переменных, байтный каталог, побайтное последовательное действие, целочисленные интервалы)
{
Цифровая запись (дирпин, Дир);
Задержка (50);
Для (int i = 0; i
Цифровая запись (stepperPin, HIGH);
DelayMicroseconds (800);
Цифровая запись (stepperPin, LOW);
DelayMicroseconds (800);
}
}
Установка void () {// шаговый двигатель, используемый на контакте ввода-вывода, настроен на вывод
PinMode (X_DIR, выход); pinMode (X_STP, выход);
PinMode (Y_DIR, выход); pinMode (Y_STP, выход);
PinMode (Z_DIR, выход); pinMode (Z_STP, выход);
PinMode (EN, выход);
Цифровая запись (EN, LOW);
}
Петля void () {
Шаг (false, X_DIR, X_STP, 200); // круг разворота двигателя по оси X, 200 шагов для круга
Шаг (false, Y_DIR, Y_STP, 200); // круг разворота двигателя по оси y, 200 шагов для круга
Шаг (false, Z_DIR, Z_STP, 200); // круг разворота двигателя по оси z, 200 шагов для круга
Задержка (1000);
Шаг (true, X_DIR, X_STP, 200); // мотор X-axis передается на круг, 200 шагов в круг
Шаг (true, Y_DIR, Y_STP, 200); // двигатель по оси y передается на круг, 200 шагов в круг
Шаг (true, Z_DIR, Z_STP, 200); // мотор по оси z передается на круг, 200 шагов в круг
Задержка (1000);
}






Смотрите так же другие товары:






