Характеристики
Полнофункциональная плата расширения Raspberry Pi 4 для 4/Pi 3B +/3B (шаговый двигатель
История изменения цены
*Текущая стоимость 1 526,10 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц |
Минимальная цена |
Макс. стоимость |
Цена |
| Mar-22-2026 |
1816.70 руб. |
1907.6 руб. |
1861.5 руб. |
| Feb-22-2026 |
1801.15 руб. |
1891.27 руб. |
1846 руб. |
| Jan-22-2026 |
1511.1 руб. |
1587.76 руб. |
1549 руб. |
| Dec-22-2025 |
1770.87 руб. |
1859.75 руб. |
1814.5 руб. |
| Nov-22-2025 |
1541.49 руб. |
1618.23 руб. |
1579.5 руб. |
| Oct-22-2025 |
1740.3 руб. |
1827.23 руб. |
1783.5 руб. |
| Sep-22-2025 |
1724.4 руб. |
1810.17 руб. |
1767 руб. |
| Aug-22-2025 |
1709.28 руб. |
1794.93 руб. |
1751.5 руб. |
| Jul-22-2025 |
1694.87 руб. |
1779.71 руб. |
1736.5 руб. |
Описание товара

[Клиенты, которые купили этот товар, также купили]
Примечание: Это новейшая обновленная версия V2.0, выпущенная в августе.
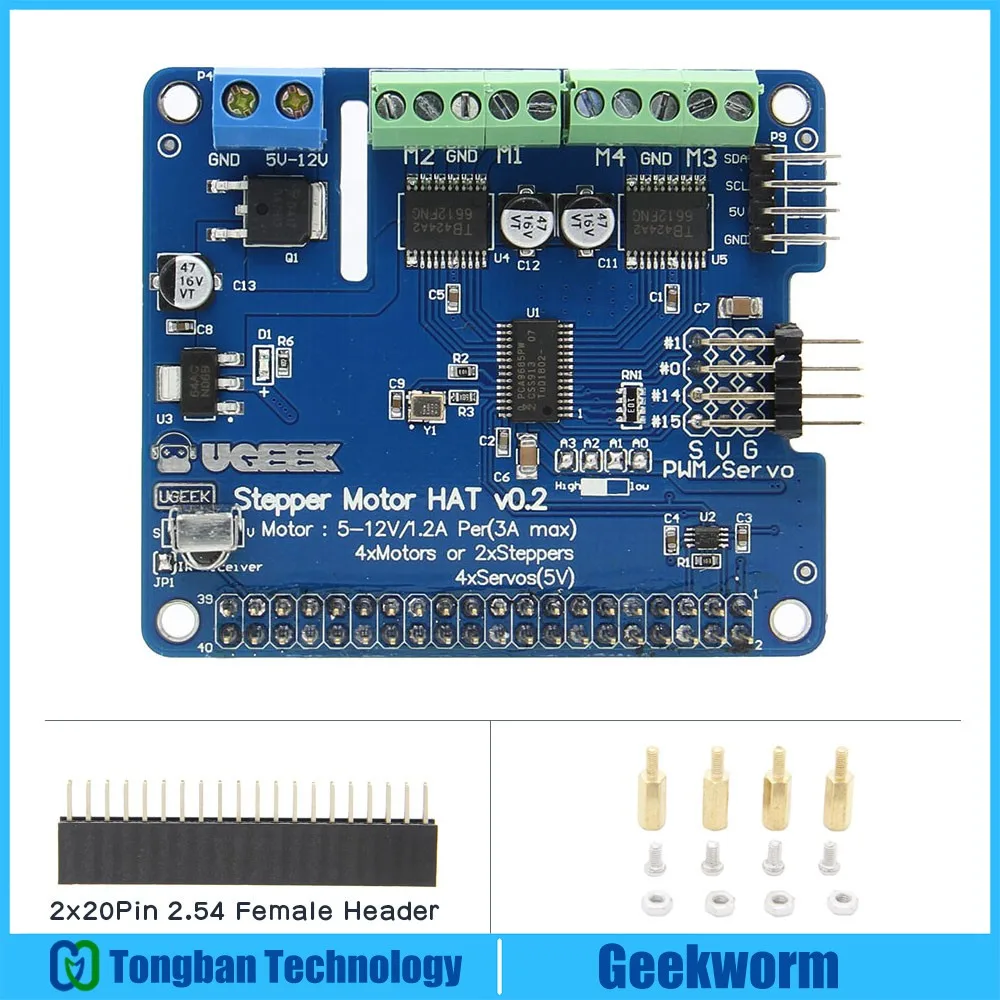
[Упаковочный лист]
-
1 х расширительный кабан для мотора робота
-
1x2x20 контактный разъем коллектора (8,5 мм + 5,5 мм/высота основания + металлический штырь Внешняя высота)
-
1 х Винтовая упаковка
![Robot-hat-main]()
[Обзор]
-
Благодаря новым шаговым шагам, ваши мечты о роботах оправдаются. Этот модуль Raspberry Pi идеально подходит для любого проекта движения, так как он может работать до 4 DC или 2 шаговых двигателей с полным управлением скоростью PWM, это также повышает способность управлять 4 сервоприборами с идеальным временем.
-
Поскольку Raspberry Pi не имеет много PWM-контактов, мы используем полностью выделенный драйвер PWM чипа, встроенного для управления направлением двигателя и скоростью. Данный чип совместим со всеми устройствами, управляемыми двигателем, и скоростью I2C. Для вождения нескольких двигателей требуется только два контакта (SDA & SCL), и, так как это I2C, вы также можете подключить любые другие устройства или шапки I2C к тем же контактам.
-
На самом деле, вы можете даже сложить несколько шапок двигателя, до 32 из них, для управления до 64 шаговыми моторами или 128 двигателем постоянного тока (или смесь двух)-Просто не забывайте покупать и паять в насадке для укладки, а не в том, что мы включаем.
-
Моторы управляются моделями MOSFET TB6612, с 1,2 А на канал, с пиковым током 3A, большим улучшением по сравнению с моделями L293D, также есть встроенные диоды flyback. У нас даже было немного места, поэтому мы добавили полярность защиты на шпильках питания и немного области прототипирования. Шляпа в сборе и протестирована, так что все, что вам нужно сделать, это припаять на входящем 2x20 слое и клеммные блоки.
-
Шаговые двигатели отлично подходят для (полуточного) управления, идеально подходят для многих роботов и проектов с ЧПУ. Данная шапка поддерживает до 2 шаговых двигателей. Python библиотечными идентично для биполярной и униполярное моторы.
-
Запуск шагового двигателя немного сложнее, чем запуск двигателя постоянного тока, но его все еще очень легко
[Особенности]
-
4 h-мосты: чипсет TB6612 обеспечивает 1,2 А на мост (пиковая мощность 3 а) с термозащитой от отключения, внутренними защитными диодами. Может работать с двигателем на 5 в постоянного тока до 12 В постоянного тока.
-
До 4-х никель-металл-двунаправленный двигатели постоянного тока с индивидуальным 8-битный выбор скорости (так, около 0.5% разрешение)
-
До 2 шаговых двигателей (однополярных или биполярных) с одной катушкой, двойной катушкой, переплетением или микроступенчатой.
-
До 4 каналов 12 бит ШИМ/сервопривод (5 В)
-
Один инфракрасный приемник (GPIO26)
-
Большие разъемы клеммного блока для легкого подключения проводов (18-26AWG) и питания
-
Защищенная полярность 2-контактный терминальный блок и джемпер для подключения внешних 5-12VDC мощность
-
Лучше всего работает с Raspberry Pi model A +, B +, Pi 2 или Pi 3;
-
Установите простую в использовании игрушку Python, ознакомьтесь с примерами, и вы готовы к использованию!
-
Pi HAT 2x20P, длинный штифт
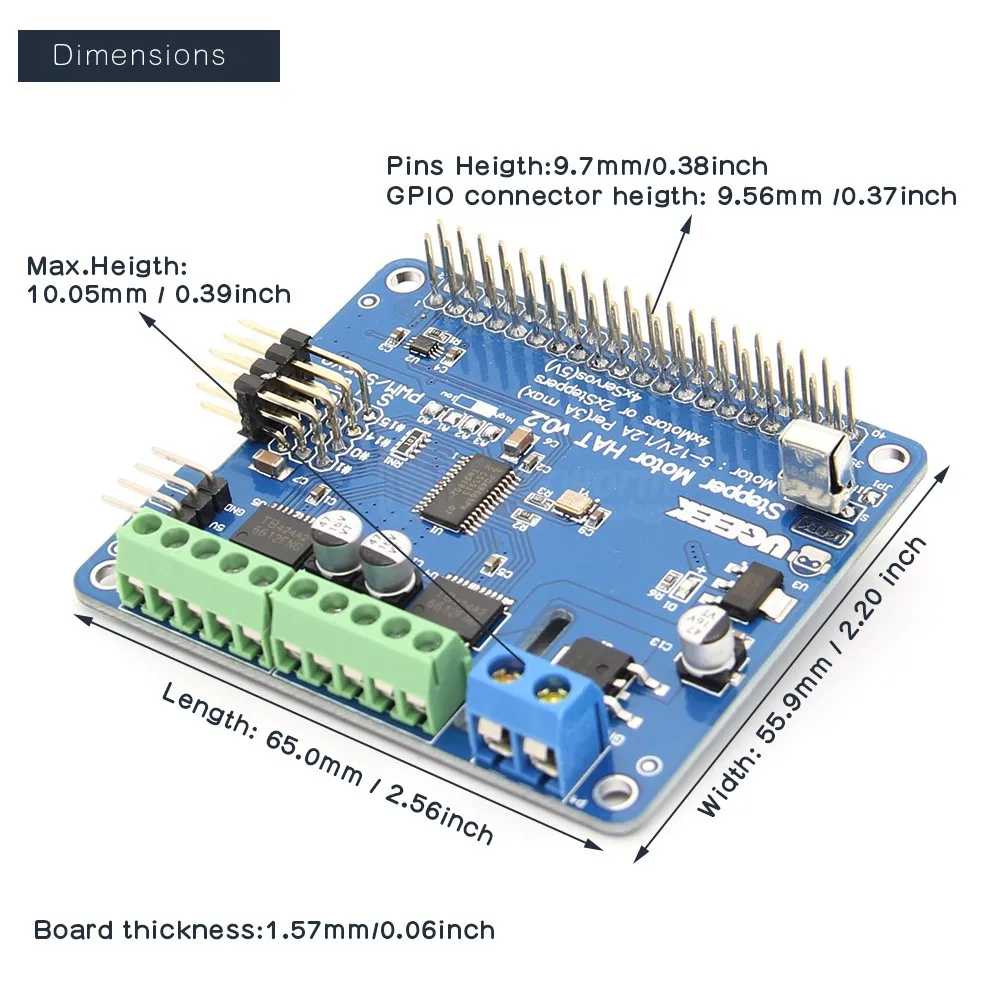
[Размеры платы]
![IMG_5110-SIZE]()
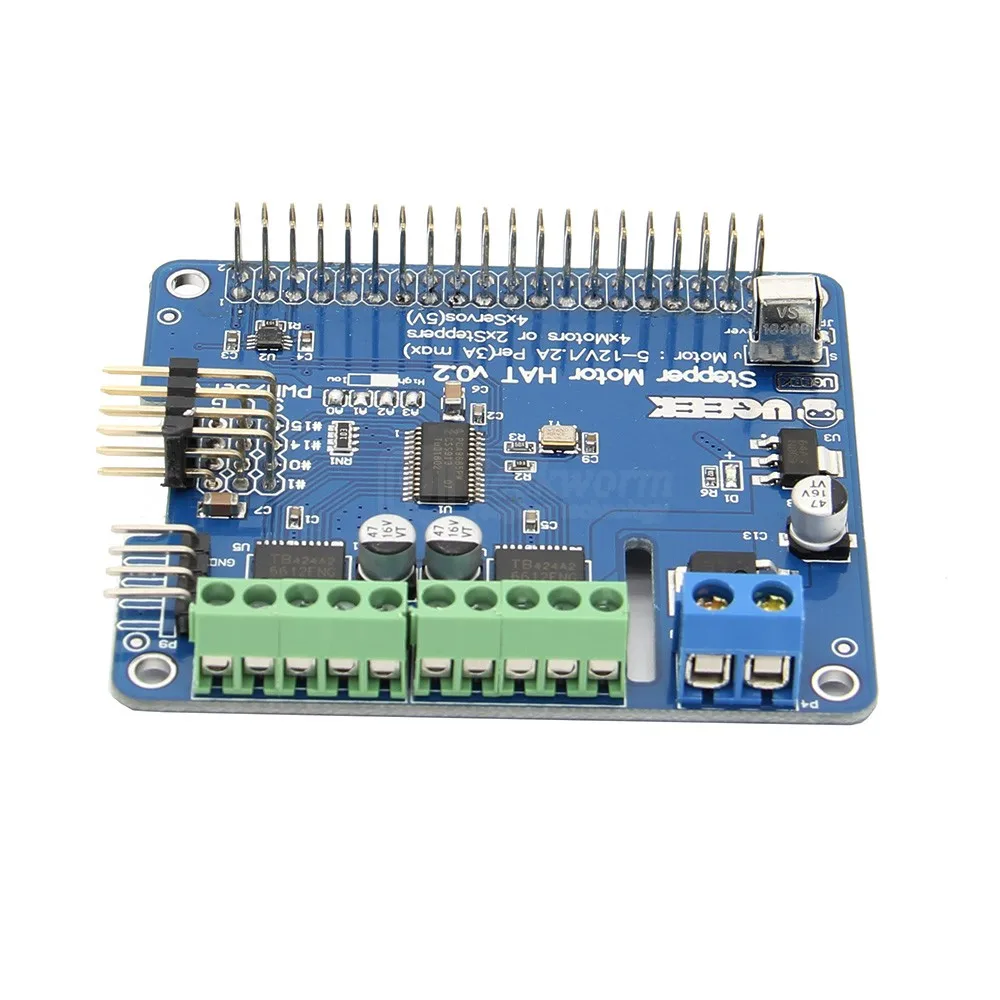
[Характеристики]
![A+]()
[Как использовать]
![W800-1]()
![W800-2]()
[Загрузка файлов]
Системы img &Более подробная информация, пожалуйста, обратитесь к URL: Www.raspberrypiwiki.com/index.php/Stepper/Motor/Servo_Robot_Expansion_Board_SKU:418460
[ВИДЕО]
-
Youtu. be/lUQ9d245ZK4
-
Youtu. be/GvSKLs977gI
-
Youtu. be/Sdk6P-6Sh-I
[Часто задаваемые вопросы]
1. Требует ли плата дополнительный источник питания?
Плата расширения робота не требует дополнительной мощности, и она питается от Raspberry Pi; Однако для внешних устройств, управляемых расширительной платой, таких как рулевое колесо, требуется дополнительный источник питания. Пожалуйста, ознакомьтесь со следующими фотографиями:
![Robot Expansion Board Power Supply]()
2. Какой адрес I2C?
I2C Адрес 0x6F, и вы можете найти эту информацию из Вики:
Www.raspberrypiwiki.com/index.php/Stepper/Motor/Servo_Robot_Expansion_Board_SKU:418460
3. Можете ли вы одновременно запускать сервопривод и двигатель постоянного тока?
Вы можете одновременно запускать сервопривод и двигатель постоянного тока с помощью python script. Если вы не обращаете внимания на время, когда программа python работает в цикле WhatsApp, вы можете подумать об этом одновременно:
Pwm. setPWMFreq(60) # Set частота до 60 Гц
Хотя (правда):
ШИМ. Сет ШИМ (0, 0, сервомин)
ШИМ. Сет ШИМ (0, 0, сервомакс)
4. Изменяют ли команды servo pwm сигнал на всех выходах?
Вы можете одновременно запускать сервопривод и двигатель постоянного тока с помощью python script. Если вы не обращаете внимания на время, когда программа python работает в цикле WhatsApp, вы можете подумать об этом одновременно:
Pwm. setPWMFreq(60) # Set частота до 60 Гц
Хотя (правда):
ШИМ. Сет ШИМ (0, 0, сервомин)
ШИМ. Сет ШИМ (0, 0, сервомакс)
Смотрите так же другие товары:



















